Pubblicato il 4 luglio 2020
Translate this page:  |
| |
|
 |
|
Abbiamo di recente discusso di come fermare correttamente e in modo automatico treni reversibili su un plastico. Lo abbiamo fatto assumendo che la percorrenza sul binario sia sempre unidirezionale, cioè che i treni arrivino sempre ad esempio da sinistra verso destra, come può tipicamente avvenire in una stazione nascosta, o su un binari o di incrocio in stazione nella quale sia prescritta una circolazione data (ad esempio quella “italiana”, ovvero con i treni che, su doppio binario, tengono la mano sinistra).
In tal caso la soluzione standard prevede due brevi sezionamenti.
Semplice stazione per effettuare incroci con circolazione “all’italiana”
Il problema che ci eravamo posti era come rispondere all’esigenza di porte far circolare anche treni reversibili (ad esempio con la motrice in coda) facendo funzionare il tutto correttamente. Lo avevamo risolto usando una coppia di sensori, e gestendoli con un paio di relè.
Tratta sezionata con due sensori
La soluzione individuata aveva il pregio di funzionare sia in analogico che in digitale.
Ora vogliamo invece gestire la circolazione in entrambe le direzioni, in modo ad esempio da poter effettuare anche sorpassi oltre che incroci.
Per un caso del genere, la soluzione classica prevede due sezionamenti per binario.
Stazione semplice con binari bidirezionali e doppio sezionamento per binario.
In tal caso la gestione dell’alimentazione delle interruzioni è un pochino più complessa. Abbiamo in passato discusso la soluzione basata su diodi che fu applicata alla stazione di Querceto. Si tratta tuttavia di una soluzione che funziona solo nel caso analogico, proprio perché agisce tramite diodi lavorando sulla direzione della corrente continua, mentre il digitale funziona in alternata. Inoltre tale soluzione funziona assumendo che la presa di corrente del convoglio in transito sia in testa allo stesso, cosa non sempre vera per i convogli reversibili (composti da automotrici o di tipo “push-pull”) nei quali la motrice può trovarsi in coda. Per questi casi abbiamo recentemente discusso di una soluzione basata su “scambi intelligenti”, nei quali è la posizione dello scambio a decidere quale tratta debba essere alimentata.
Ci proponiamo ora di presentare un’ulteriore soluzione che prescinda dall’azione degli scambi. Dovrà essere in grado di gestire automaticamente le fermate su un binario bidirezionale sia per convogli tradizionali che per treni reversibili, e sarà basata su sensori che rilevino la presenza del convoglio. Tali sensori potranno essere magnetici, ottici o di altro tipo. La cosa essenziale è che i convogli reversibili diano un segnale a entrambe le estremità del convoglio, mentre quelli tradizionali potranno darlo anche solo in testa. Eventuali altri segnali intermedi (come nel caso di pedali azionati da ogni asse) non dovranno creare disturbi.
Come abbiamo fatto nel caso unidirezionale, per esemplificare considereremo dei sensori di tipo Hall (discussi recentemente). Per altri tipi di sensori varranno considerazioni analoghe, facendo attenzione a quanto abbiamo già menzionato nel caso unidirezionale: i sensori di tipo Hall funzionano in logica inversa, mentre altri sensori (ad esempio i reed) usano logica diretta. Rimandiamo alla nota già citata per un “ripasso” di questo aspetto. Noi quindi procederemo nella discussione ragionando nella logica inversa. Qualora si usino invece dei sensori che forniscono segnali in logica diretta occorrerà adattare lo schema, adeguando i collegamenti dei relè (usiamo i soliti “Bistable 5V Coil Latching Relay DPDT 2A 30VDC 1A 125VAC HFD2/005-S-L2-D” discussi nelle note precedenti).
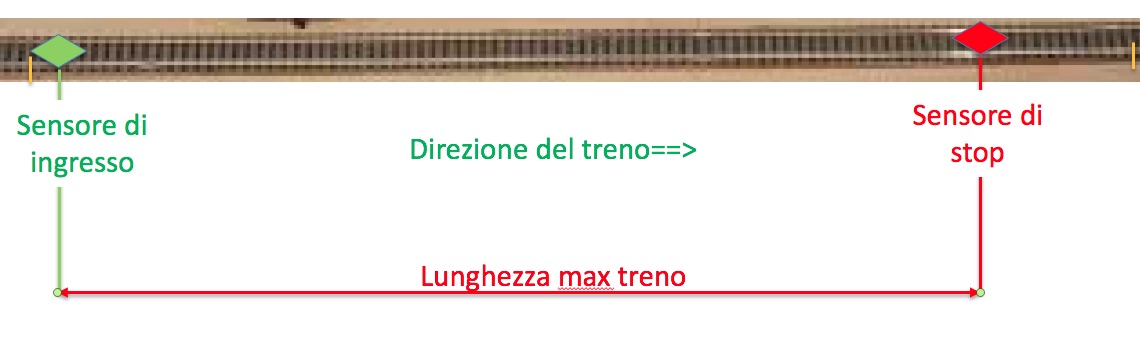
Il tratto di linea interessato sarà dotato di quattro sensori, come da immagine. Si tratta di due coppie, in ciascuna delle quali i due elementi hanno lo scopo di rilevare l’ingresso della testa del treno nella tratta interessata e l’arrivo della stessa al punto di fermata previsto. I due sensori della coppia devono distare tra loro più della lunghezza del più lungo convoglio che potrà transitare sulla tratta. Guardando da sinistra a destra, chiamiamo i sensori nel seguente modo:
IN1=> ; <=STOP2 ; STOP1=> ; <=IN2

Tratta con quatto sensori
In figura sono verdi i sensori destinati a regolare la marcia verso destra, e rossi quelli per la marcia verso sinistra. Naturalmente al passaggi del magnete (sia di testa che di coda, se presente), tutti i sensori risponderanno (se abilitati – ricordiamo che nel caso unidirezionale avevamo previsto di disabilitare il sensore di stop in certi casi). Daranno segnale anche quelli previsti per la marcia in direzione opposta: starà alla logica di controllo far sì che solo quelli rilevanti abbiano effetto. Si potrebbe obiettare che forse si potrebbe lavorare con una sola coppia di sensori, ma in realtà per massimizzare l’uso della lunghezza disponibile è meglio usarne quattro. Infatti il convoglio potrebbe fermarsi a una certa distanza dal sensore di stop dopo averlo superato a causa delle inerzie di movimento, e quindi non può essere troppo prossimo alla fine utile del binario, dove invece è comodo posizionare il sensore di ingresso in direzione opposta. In tal modo la lunghezza massima del convoglio ospitato può essere un po’ superiore, e come si sa lo spazio non è mai abbastanza sui plastici…
Sappiamo già dal caso unidirezionale che, presi nella direzione prevista, i sensori e la loro logica di controllo fanno quel che devono in modo corretto. Affinché tutto vada bene nel caso bidirezionale occorre esaminare cosa avviene se un convoglio passa in direzione opposta a quella prevista.
Riprendiamo quindi lo schema unidirezionale e la relativa tabellina delle azioni che avevamo presentato per il caso unidirezionale.

Controllo unidirezionale, con aggiunta del segnale di rilevazione di binario occupato (indicato dalla linea tratteggiata viola) e controllo alimentazione sensore di stop. I due diodi servono a evitare ritorni di corrente.
| Azione | Comando | Effetto |
|---|---|---|
| START | SET A
SET B |
|
| IN | RESET A
SET B |
|
| STOP | RESET B |
|
Assumiamo ora che un convoglio sia transitato nel verso giusto, e vediamo cosa avviene per un convoglio in direzione opposta. Dovremo discutere separatamente il caso che il treno transitato in direzione giusta avesse un solo magnete, o più di uno.
Se il convoglio passato per il verso giusto aveva un solo magnete, l’ultima azione effettuata è stata uno START. Ci troviamo quindi con entrambi i canali di alimentazione aperti e il sensore di stop abilitato (del segnale di occupazione non ne discutiamo, è un aspetto secondario che ci conviene tralasciare per non appesantire troppo la discussione: lo lasciamo… come esercizio per il lettore!).
Il treno che ora giunge dalla direzione opposta passerà sul sensore di STOP, che chiude il canale B di alimentazione e disabilita il sensore stesso. Se il treno ha più magneti, quelli successivi non intervengono perché il sensore è disabilitato. Notiamo che se invece l’ultimo treno transitato in direzione “giusta”aveva il magnete di coda (o più magneti), avrà già provveduto lui ad arrivare a questo stato disabilitando il sensore di STOP, e quindi possiamo procedere senza più distinzioni tra i due casi.
Il nostro convoglio in transito in direzione opposta giunge ora al sensore di IN, chiude il canale A, apre il canale B, abilita il sensore di STOP ed esce dal tratto controllato, lasciandolo in uno stato compatibile per l’arrivo di un successivo treno nel verso “giusto”.
Se però invece abbiamo un secondo treno nella direzione che abbiamo definito “opposta”, questo trova lo stato lasciato da IN, e sappiamo che STOP subito dopo IN ferma il treno, cosa che non vogliamo! Per sistemare le cose, occorrerebbe che il treno che percorre in uscita nella direzione “opposta” dia uno START prima di lasciare la tratta controllata. Con i soli due sensori che abbiamo a disposizione non riusciamo a risolvere, ma se consideriamo la sequenza di 4 sensori menzionata prima ce la possiamo fare facilmente.
Tratta con quatto sensori
I sensori a cui abbiamo fatto riferimento in questa discussione, nella figura qui sopra sono denominati IN1 e STOP1. E’ sufficiente prevedere che il sensore IN2, che appartiene al sistema che controlla la direzione verso sinistra, faccia uno START nel sistema che stiamo considerando ora, ovvero quello che controlla il traffico verso destra. Abbiamo già visto che se l’ultima azione è stata uno START, tutto va bene sia per gli ingressi in una direzione che nell’altra, e quindi abbiamo risolto il nostro problema.
La nostra soluzione finale dunque si basa su due sistemi di controllo unidirezionale accoppiati tramite una retroazione che all’ingresso in una direzione effettua uno START sull’altra.

Sistema di controllo bidirezionale per la tratta con quattro sensori
Tutto il tratto interessato è sezionato su entrambe le rotaie. In figura, questo è rappresentato dalle barrette verticali arancioni alle due estremità. Al di fuori, sia a destra che a sinistra, il binario superiore ha la polarità grigio-azzurra e quello inferiore quella arancione. La coppia di relais di sinistra controllano la marcia da sinistra verso destra e agiscono sul binario inferiore, mentre la coppia di destra controlla la marcia nella direzione opposta e lo fa agendo sul binario superiore, così da non avere interferenze tra i due controlli.
Abbiamo due pulsanti per avviare un convoglio fermato sulla tratta: quello che fa partire il convoglio diretto verso destra effettua un SET sui relais C e D, quello che avvia verso sinistra effettua un SET sui relais A e B. Volendo, sarebbe possibile unificare i pulsanti, mettendone uno unico che dia un SET a tutti e quattro i relè. Tuttavia, ad esempio nel caso di una stazione nascosta nella quale non si vede il convoglio, potrebbe essere preferibile avere i due pulsanti separati così da essere certi di non commettere errori, ed avviare il convoglio solo se è diretto nella direzione voluta.
Abbiamo terminato, ma come ulteriore verifica che tutto funzioni correttamente ripetiamo il ragionamento in modo leggermente differente. per verificare che le cose funzionino come vogliamo, consideriamo il caso di un treno in transito ed analizziamo gli impulsi dati dai sensori ed il loro effetto.
Dobbiamo considerare che il convoglio in transito agirà su ciascun sensore due volte, con il magnete di testa e con quello di coda. Il discorso è equivalente per gli altri tipi di sensore. Per i sensori a pedale avremo anche molte altre rilevazioni intermedie: si potrebbe però verificare esplicitamente che anche in questo caso le cose non cambiano, anche se non ne riportiamo la “dimostrazione” qui, limitandoci a trattare il caso dei sensori anteriore (A) e posteriore (P).
Consideriamo la sequenza di eventi per un treno che transiti da sinistra a destra (nella direzione opposta il caso è simmetrico).
La sequenza di eventi sarà:
- A su IN1=>
- A su <=STOP2
- P su IN1=>
- P su <=STOP2
- A su STOP1=>
A questo punto il convoglio si dovrà fermare. Alla pressione del pulsante di partenza, si riavvierà e si avrà la seguente sequenza di eventi:
- A su <=IN2
- P su <=STOP2
- P su <=IN2
La seguente tabella mostra lo stato delle uscite di corrente dai vari relè (A, B, C, D) dopo ogni azione. 0 indica che in uscita non c’è corrente, 1, indica che la corrente è presente. Le cifre indicate in rosso significano che vi è stato un comando che ha imposto quel valore, mentre quelle in nero indicano il mantenimento di uno stato precedente.
Nello stato iniziale è indispensabile che almeno uno tra A e b abbia corrente, ed analogamente che si sia corrente in uscita in almeno uno tra C e D, altrimenti il treno si fermerebbe in ingresso nella tratta sezionata.
| iniziale | IN1=> | <==STOP2 | IN1=> | <==STOP2 | STOP1=> | |
| A | 1 o 0 | 0 | 0 | 0 | 0 | 0 |
| B | 0 o 1 | 1 | 1 | 1 | 1 | 0 |
| C | 1 o 0 | 1 o 0 | 0 | 0 | 0 | 0 |
| D | 0 o 1 | 1 | 1 | 1 | 1 | 1 |
Come possiamo osservare, almeno uno tra A e B ed uno tra C e D ha sempre corrente fino a quando si raggiunge il sensore STOP1=> : a quel punto sia A che B non conducono e il convoglio si ferma.
A questo punto premiamo il tasto di START e seguiamo gli eventi successivi.
| iniziale | START | <=IN2 | STOP1=> | <=IN2 | |
| A | 0 | 1 | 1 | 1 | 1 |
| B | 0 | 1 | 1 | 0 | 0 |
| C | 0 | 0 | 1 | 1 | 1 |
| D | 1 | 1 | 0 | 0 | 0 |
Vediamo che dallo Start in poi abbiamo sempre almeno un polo attivo tra A e B ed uno tra C e D, quindi il convoglio prosegue uscendo dal sezionamento. Lo stato finale del sezionamento stesso (1-0-1-0) è compatibile con un nuovo ingresso successivo.
Ripetendo l’analisi per il percorso da sinistra a destra avremo risultati analoghi. Vi sarà una differenza nello stato finale, che diverrà (0-1-0-1), comunque compatibile con un successivo ingresso.
Nel caso fossimo interessati a un binario unidirezionale, basta sopprimere i sensori nella direzione che non ci interessa ed i relativi relè: tutto funzionerà come deve.

















Lascia un commento